
I am a research associate pursuing my PhD in computer vision for robotics at TU Dortmund, where I also completed my MSc in Automation & Robotics. Within the logistics research community shared by TU Dortmund and Fraunhofer IML, I work on deep learning methods for unseen objects and high-speed perception. I’m also affiliated with the Lamarr Institute for Artificial Intelligence. I have hands-on experience across all aspects of robotics, including electronics, embedded systems, localization, and perception. I’m interested in continuing my research on perception for high-speed robotics, especially using event vision.
Seeking research and industry opportunities starting Q1–Q2 2026 (flexible start date).
Updates
- [August 2025] MR6D paper accepted at ICCV R6D Workshop
- [June 2025] BOP 2024 report presented at CVPR – CV4MR workshop
- [March 2025] MTevent paper accepted at CVPR – Event Vision workshop
- [October 2024] Our EventRec project on perception for high-speed robots officially started, following successful funding acquisition that I spearheaded
- [August 2024] "Centroid Triplet Loss" paper with University of Bonn presented at IEEE CASE 2024
Publications
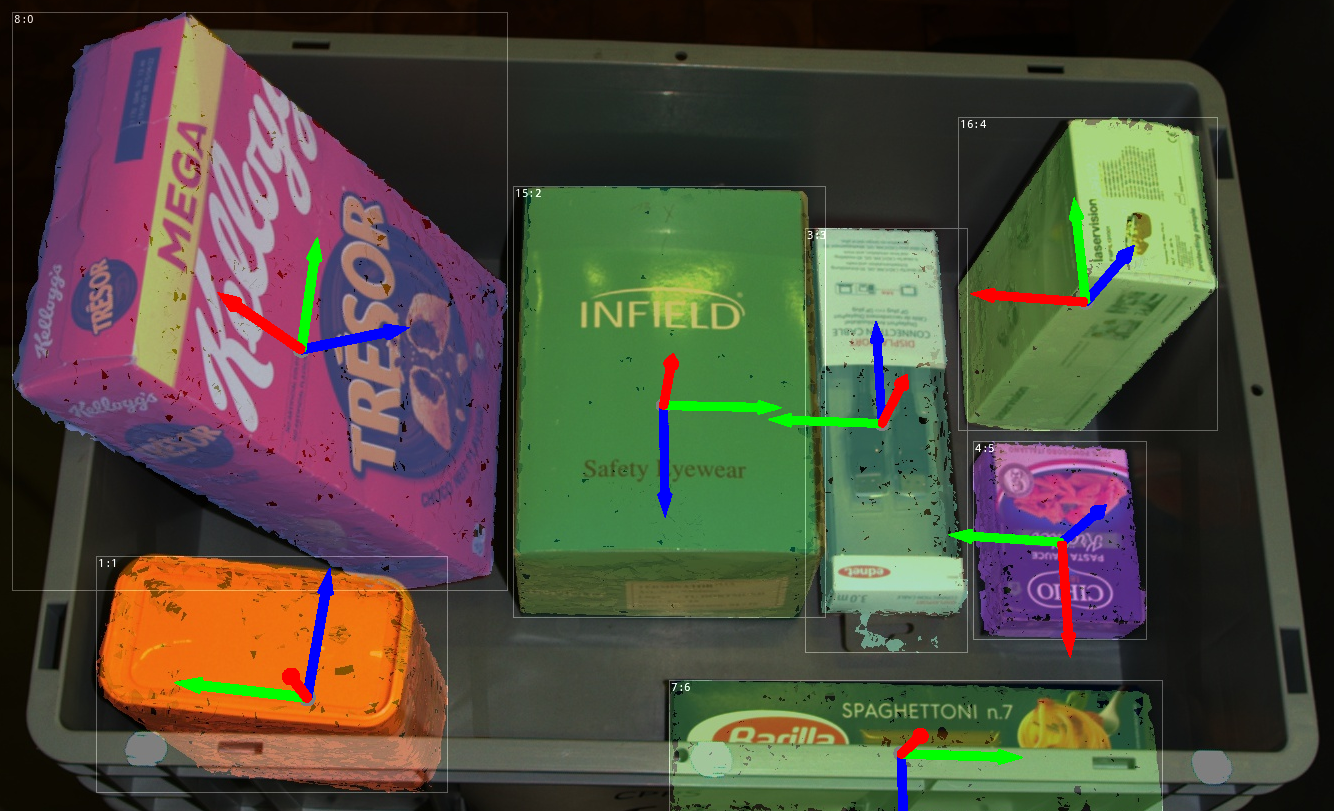
MR6D: Benchmarking 6D Pose Estimation for Mobile Robots
1 TU Dortmund · 2 Fraunhofer IML · 3 Lamarr Institute
ICCV 2025 — R6D Workshop

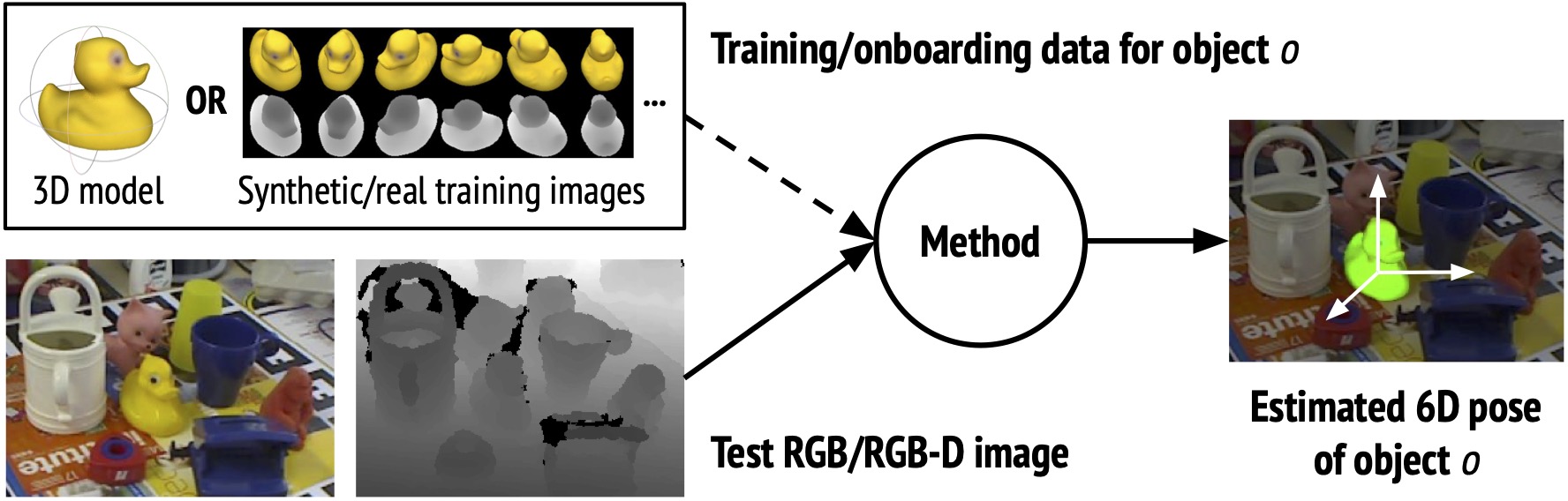
BOP Challenge 2024 on Model-Based and Model-Free 6D Object Pose Estimation
1 ENPC ParisTech · 2 NVIDIA · 3 University of Toronto · 4 CTU Prague · 5 TU Dortmund · 6 KAIST · 7 NAVER LABS · 8 MVTec · 9 TU Munich · 10 Niantic · 11 Heidelberg University · 12 Google · 13 Meta
CVPR 2025 – CV4MR Workshop (Best Paper Award)
![]()
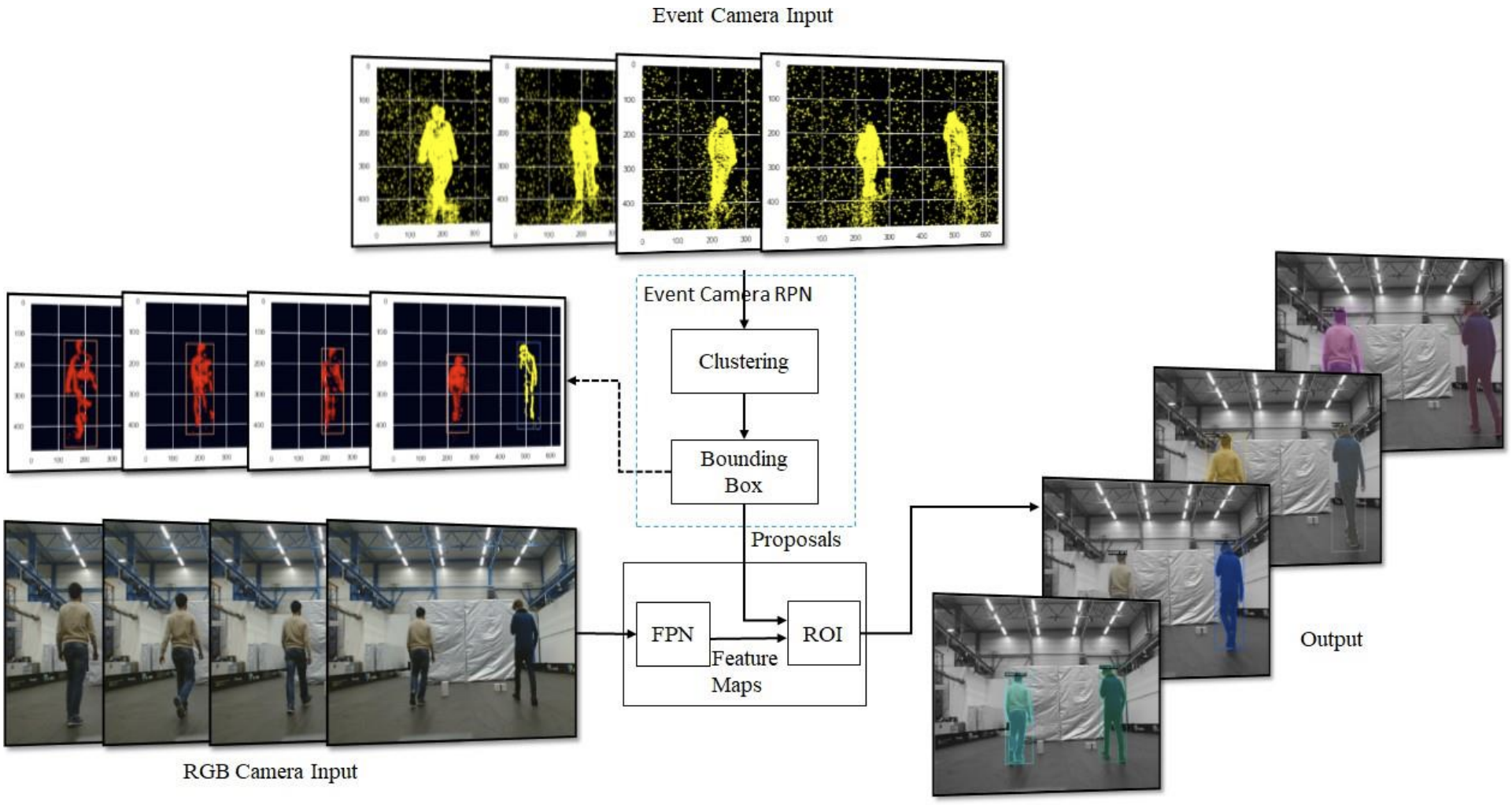
MTevent: A Multi-Task Event Camera Dataset for 6D Pose Estimation and Moving Object Detection
* Equal contribution.
1 TU Dortmund · 2 Lamarr Institute
CVPR 2025 — Workshop on Event-based Vision
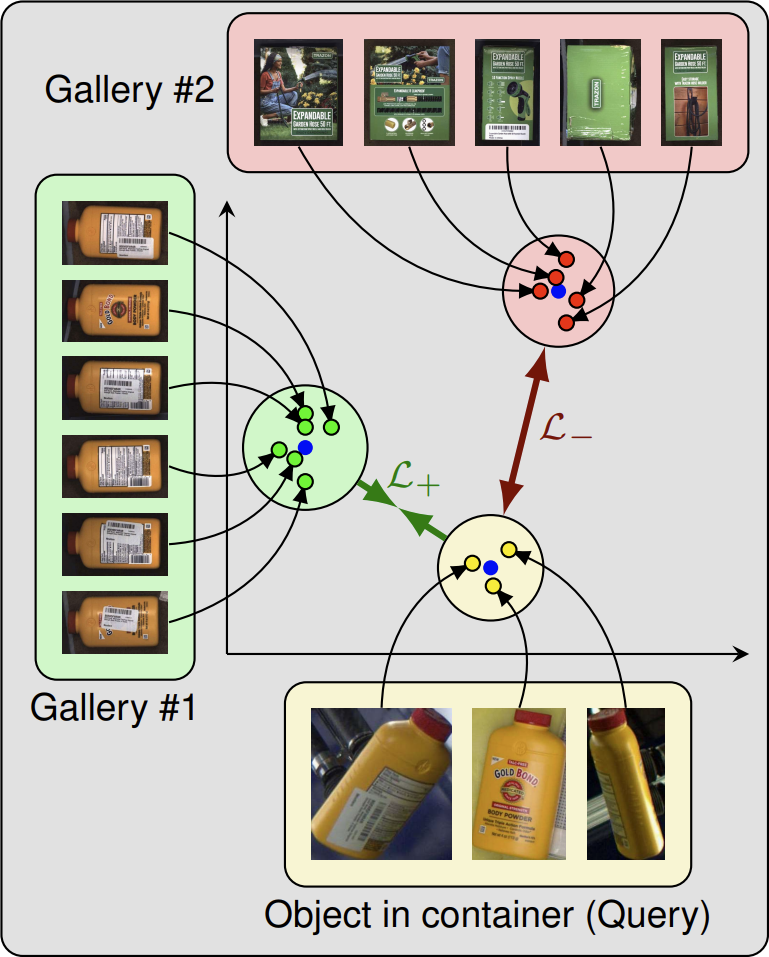
Learning Embeddings with Centroid Triplet Loss (CTL) for Object Identification in Robotic Grasping
1 TU Dortmund · 2 University of Bonn · 3 Fraunhofer IML
IEEE CASE 2024
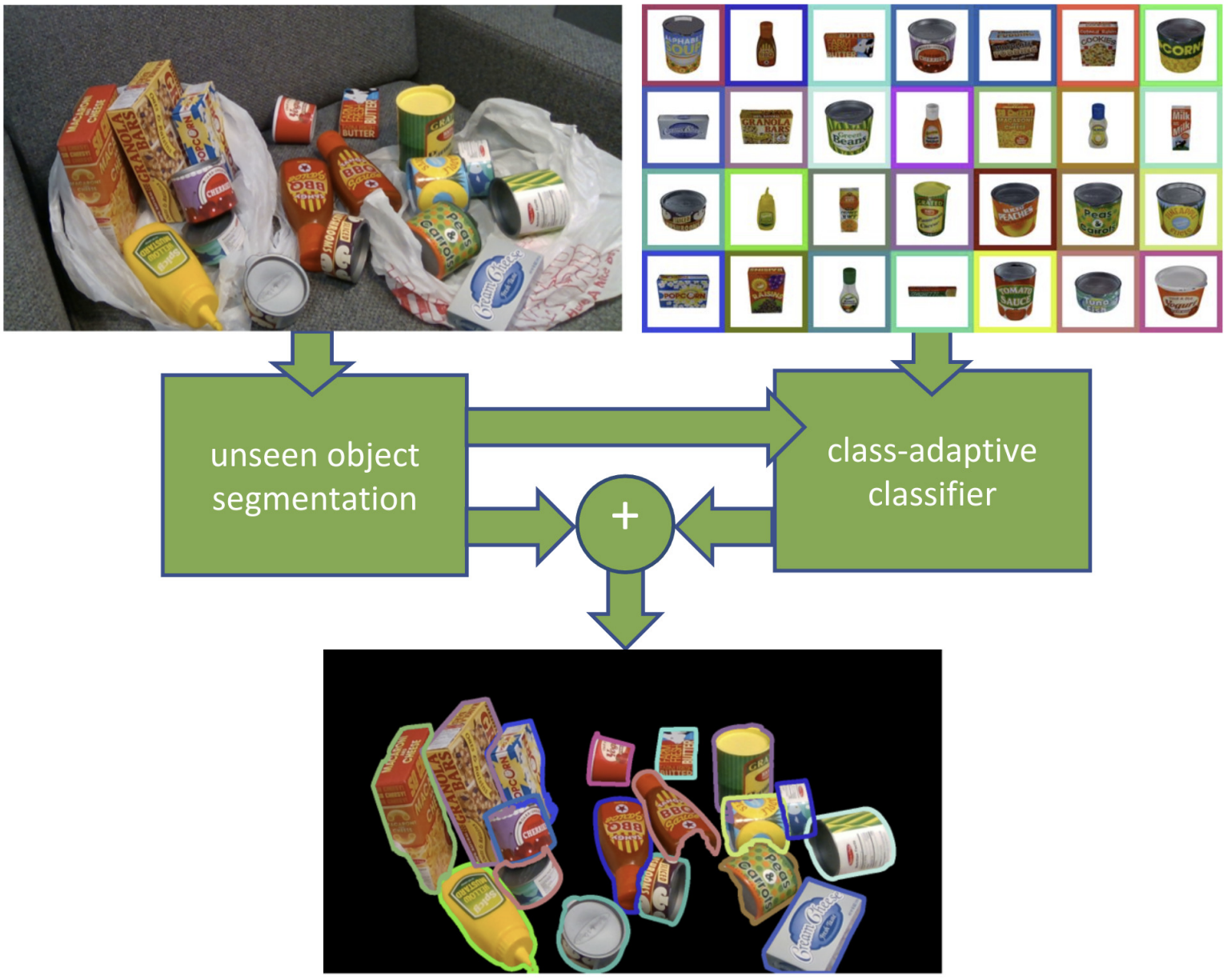
DoUnseen: Tuning-Free Class-Adaptive Object Detection of Unseen Objects for Robotic Grasping
TU Dortmund
RSS 2023 – Workshop on Perception and Manipulation Challenges for Warehouse Automation (non-archival)
![]()
SensorFloor: A Grid-based Sensor Floor Platform for Robot Localization using Machine Learning
TU Dortmund
IEEE I2MTC 2023
Projects
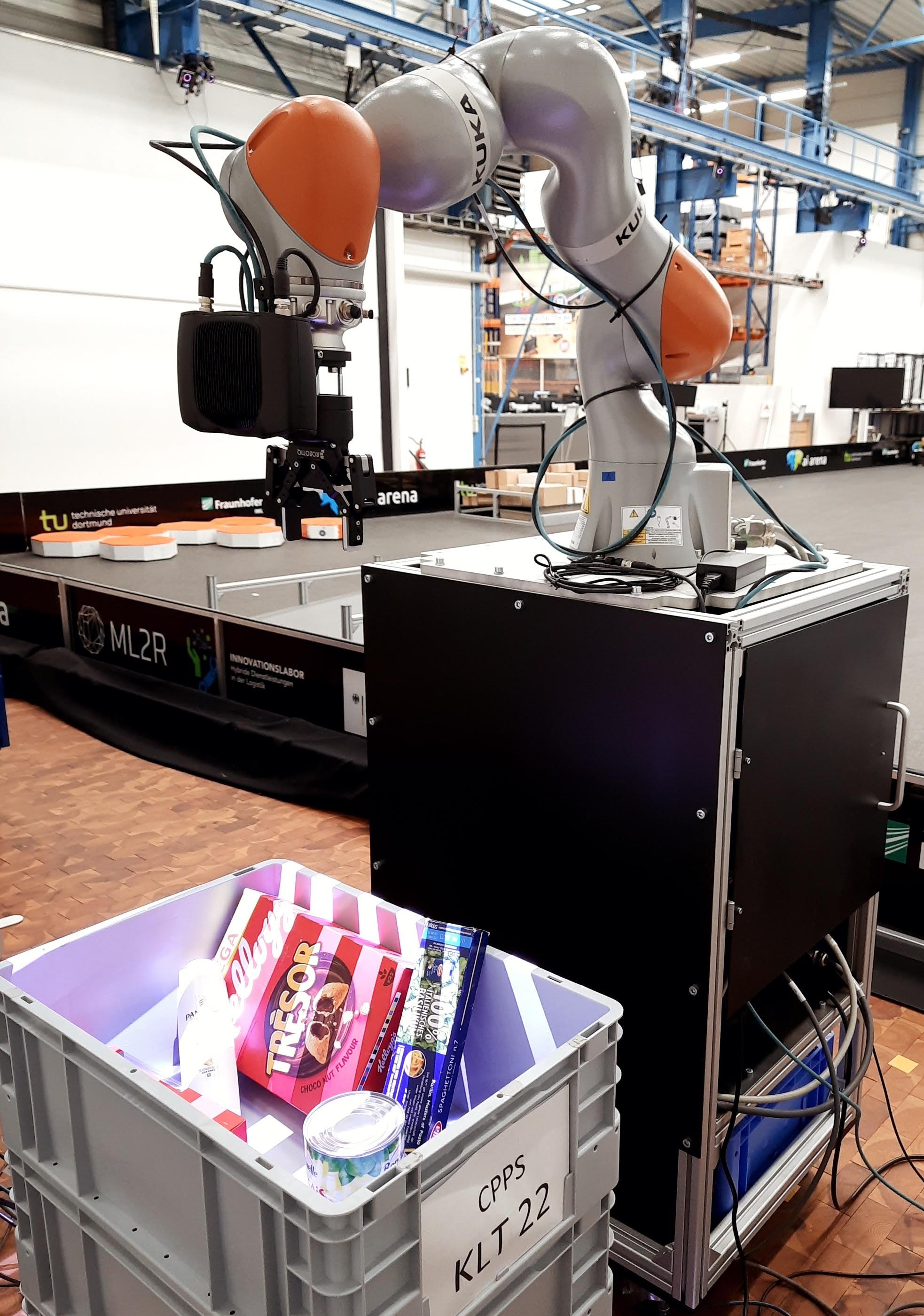
EventRec
TU Dortmund · (2023 – Ongoing)


I proposed the EventRec project and led it from concept to securing funding from the AIF/IGF, in close collaboration with colleagues.
The project focuses on perception for high-speed robotics (e.g., the O³dyn robot) using event cameras. It develops generic methods with a multi-modal stereo-event and RGB camera system for 3D detection of fast-moving objects, enabling mobile robots to navigate at high speeds.
Industry partners: KION, Jungheinrich, Framos and others.
DoUnseen Package
TU Dortmund & Lamarr Institute · (2020 – Ongoing)
Package for 2D segmentation of unseen objects and the main outcome of my PhD work.
The package segments arbitrary objects from only a few images, making it broadly applicable. I focused on two applications: bin picking and grasping for mobile robots, for which dedicated datasets were collected.
While the package itself targets segmentation, our centroid triplet loss (CTL) built on top of it achieved strong results on ArmBench. This line of work is especially relevant to logistics, where countless items must be segmented and classified, and parts have already been transferred to industry.
BOP Benchmark
Virtual Community · (2024 – Ongoing)
I'm involved in the BOP community which is organized by Meta, Google, CTU Prague, ENPC ParisTech, NVIDIA, Niantic, and others.
BOP is a collaborative benchmark for 6D pose estimation. I joined the organizers in 2024, contributing to the annotation tool in the BOP toolkit, dataset collection, and toolkit maintenance. The benchmark has recently expanded to unseen 6D pose estimation, closely aligned with my PhD research.
Robotic Grasping Using Deep Learning and Ensemble Methods
TU Dortmund – Institute of Robotics Research (IRF) · 2020
Developed a grasping pipeline integrating deep learning and ensemble methods, including dataset collection, analytical approaches, and a voting mechanism to boost performance.
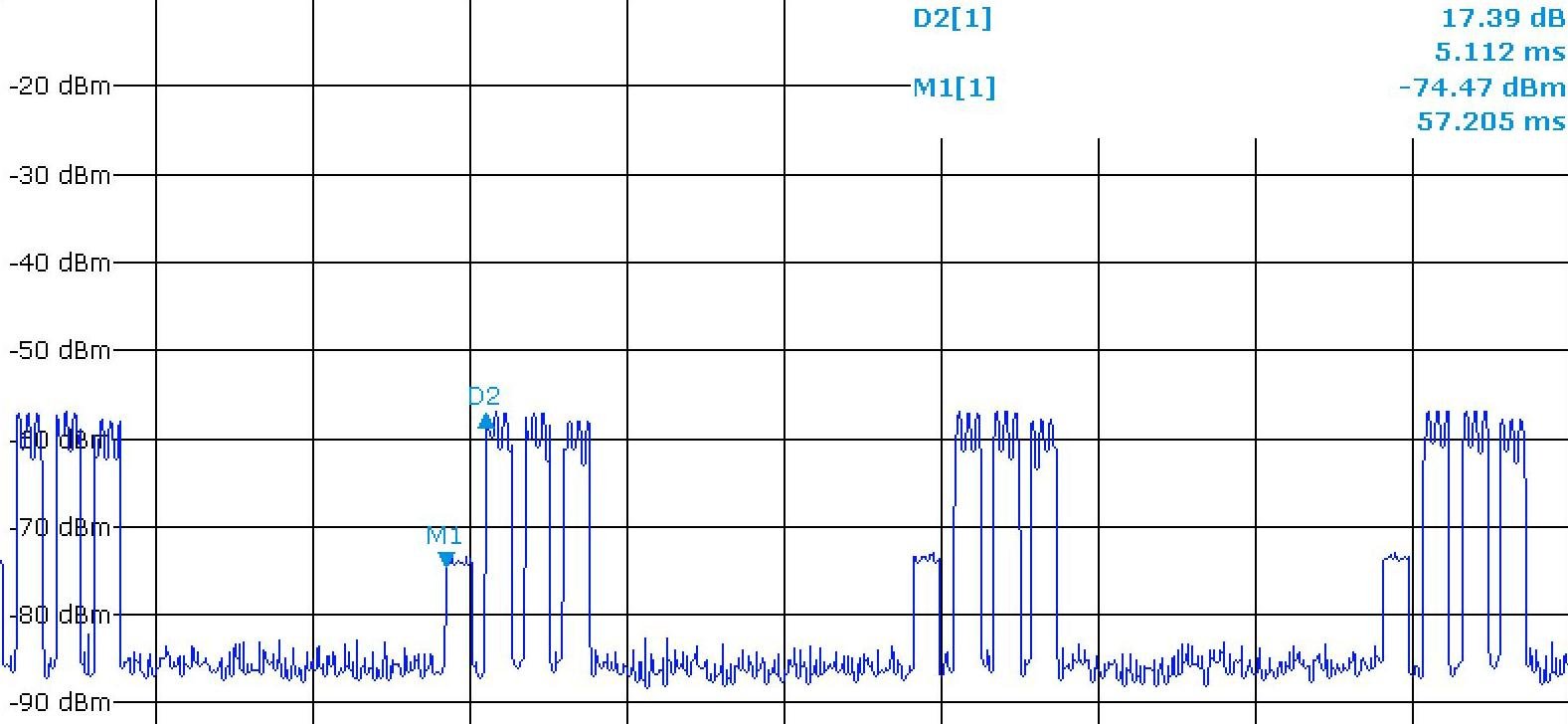
DeBr: Decentralized Brains Radio Protocol
TU Dortmund · 2019 – 2020
DeBr is a radio protocol designed to efficiently flood information across dense, unstructured networks of radio nodes. It leverages constructive interference, where multiple radios transmit the same message simultaneously with nanosecond precision. I was responsible for implementing the entire protocol and developing its firmware using Contiki-NG OS and the TI SimpleLink SDK. This work was part of my then supervisor Aswin Venkatapathy’s PhD research (now ETH Zürich).
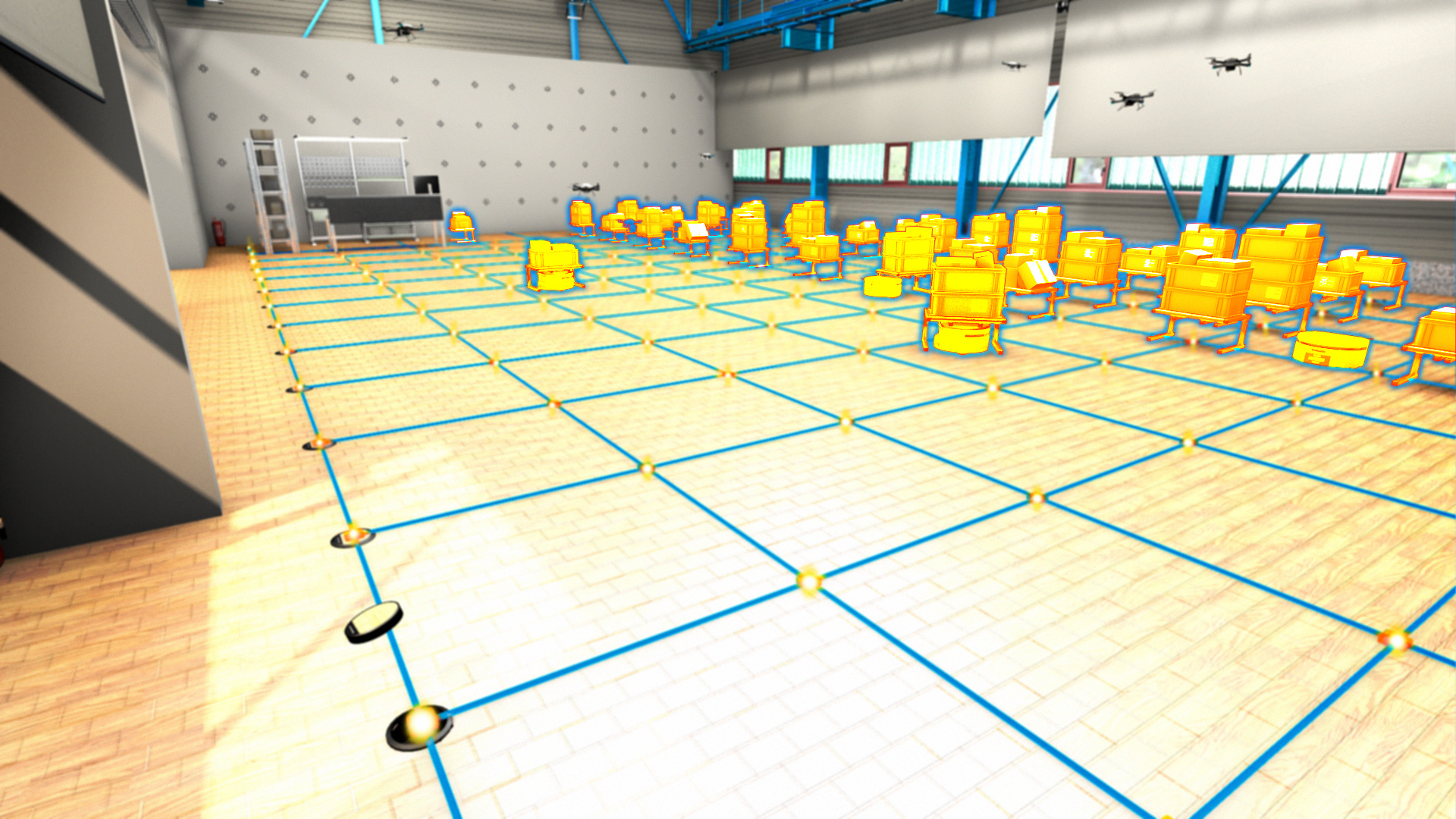
Sensor-floor Testbed
Fraunhofer IML & TU Dortmund · 2020
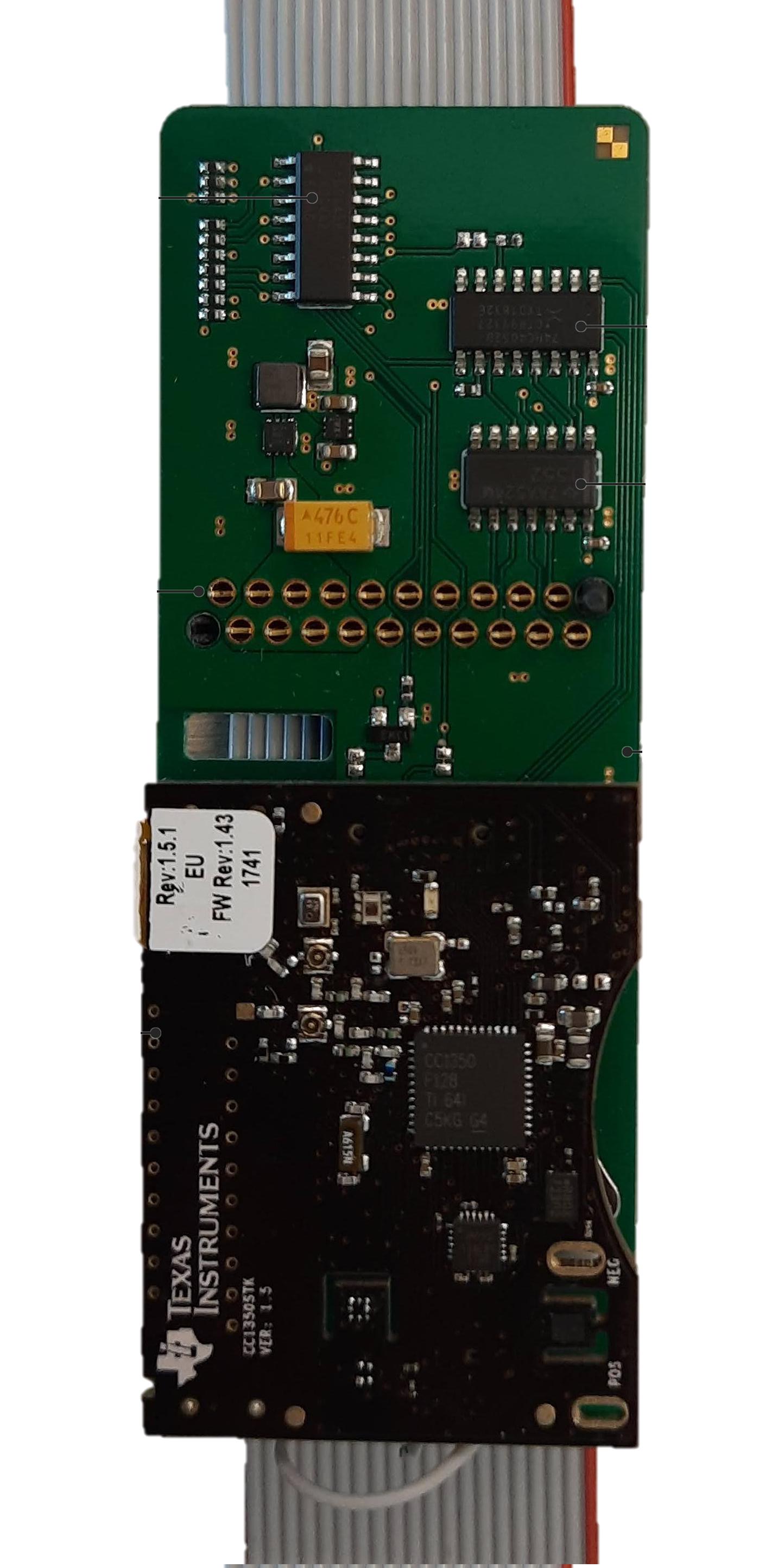
Sensor-Floor is a grid of 345 Texas Instruments SensorTags, each equipped with ten different sensors. The testbed is used to evaluate algorithms related to radio protocols (e.g., DeBr) and robot localization. The project was mainly developed by Aswin Venkatapathy.
I was responsible for programming the node firmware and developing a Linux command-line tool to control the system, including flashing the nodes and collecting data. Additionally, I contributed to the development of a localization system built on top of the Sensor-Floor platform.
Mineprobe
Innovision Robotics · 2017 – 2018
The project aimed to develop a semi-autonomous mobile robot for landmine detection. My responsibilities included sensor fusion of laser and stereo cameras for point cloud acquisition, integrating RTK-GPS and IMU data for localization, as well as hardware setup and PCB design.
My Hobbyist Robotics Time
Personal robotics projects and competitions, Egypt · 2012 – 2017
A collection of self-initiated robotics projects and competition entries during my early years in Egypt. These projects involved building robots from scratch, experimenting with ROS, sensor fusion, embedded control, and maze-solving algorithms.

Clumsybot
Developed as my bachelor thesis at the National Telecommunication Institute, Egypt. An autonomous indoor mobile robot built from scratch using ROS for navigation and control.
Fight Game Robot
Drive a robot with human gestures using sensor fusion and real-time control.
Maze Solver
Maze-solving robot for competitions using embedded control and maze algorithms.
About Me
Work Experience
- Research Associate 2023 – Present · DortmundLAMARR Institute for Machine Learning and Artificial Intelligence
Conduct research on deep learning and computer vision for robotic grasping and high-speed perception.
- Research Associate 2020 – Present · DortmundTU Dortmund – Chair of Materials Handling and Warehousing
Teach cyber-physical systems while managing departmental servers, backups, and research tooling.
- Student Research Assistant 2019 – 2020 · DortmundTU Dortmund – Chair of Materials Handling and Warehousing
Authored research, prototyped simulations, and built low-power embedded firmware.
- Working Student · Robotic Software 2018 · MünsterProvisio GmbH / Xamla
Delivered ROS drivers and tooling in Python and C++ for new robotic platforms.
- Robotics Software & Hardware Developer 2016 – 2017 · EgyptInnovision Robotics
Designed sensing, localization, and PCB hardware for the Mineprobe landmine-detection robot.
Education
- PhD · Computer Vision for Robotics 2021 – Q2 2026TU Dortmund
Researching generalization of deep learning models for robotic grasping.
- MSc · Automation & Robotics 2017 – 2020TU Dortmund
- BSc · Electrical & Computer Engineering 2011 – 2016Higher Technological Institute, Egypt